INTELLIGENT SURVAILLENCE CAMERA SYSTEM- Ricardo Iglesias
- Concepto
- Hardware
- Software
- Imágenes
- Vídeo
- LIVE!!!
- Creditos
La continua proliferación de cámaras de vigilancia nos introduce en una “paranoia” de inseguridad mundial cotidiana, lo que podemos denominar, la sociedad de la vigilancia. El proyecto propone la creación de un conjunto de cámaras robóticas “vivas” que persigan a la gente.
El 13 de octubre del 2007 saltó a los titulares de los medios de comunicación (El País) la intención de la ministra de interior francesa de triplicar en dos años el número de cámaras de vigilancia - unas 6.500 unidades-, ampliar la conexión de los centros de mando policiales a las 230 ciudades más importantes y utilizar pequeños aviones no tripulados dotados con cámaras para “controlar” los suburbios de Paris. No solo en Francia las cámaras se reproducen y viven, NY se esta planteando una iniciativa de 90 millones de dólares para realizar su “Ring of Steel” a imitación del de Londres, un circulo de vigilancia de 24 h. compuesto por 65.000 unidades en la city y más de 4,2 millones de cámaras en todo el país.
Por su lado, la ciudad de Barcelona ha declarado la necesidad de crear una cadena de cámaras para “zonas conflictivas”, y en Zaragoza nos encontramos más de 5.000 cámaras vigilando zonas públicas y privadas (El Periódico de Aragón), como la misma noticia indica el problema es que existe una sutil línea divisoria entre la búsqueda de la máxima seguridad y el derecho a la intimidad. Además, las denominadas “políticas del miedo” e “ideología de la seguridad” se han convertido en el mantra continuo de un sistema de control totalitario, para el cual, como bien indica la ministra francesa la opinión pública esta preparada.
La propuesta ahondan en estos conceptos en un proceso abierto de trabajo con máquinas, con las posibilidades de transformar cualquier objeto en un robot y reintroducirlo, con una mayor carga crítica y, por supuesto, se inscribe en nuestra preocupación por la utilización indiscriminada de cámaras “para nuestra propia seguridad”.
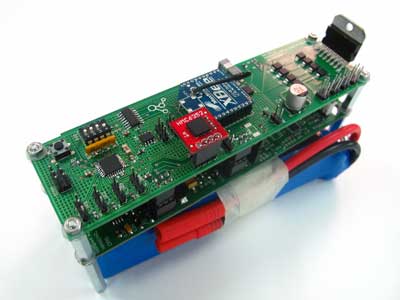
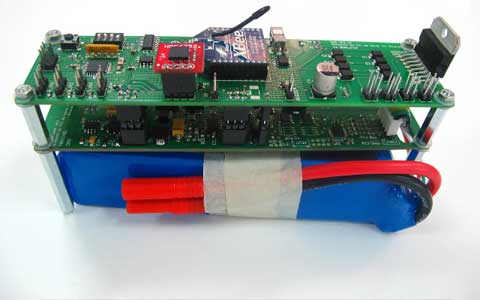
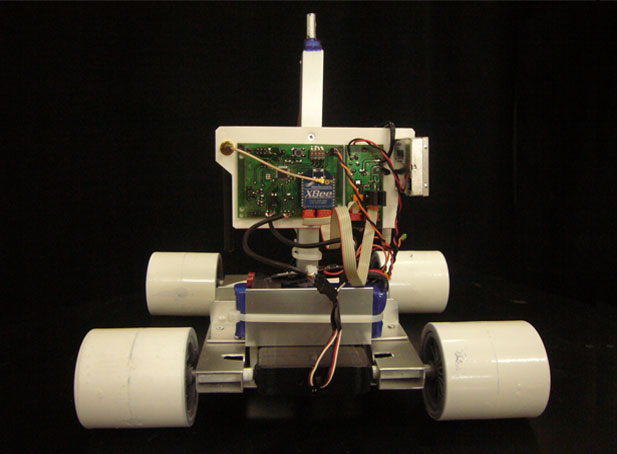
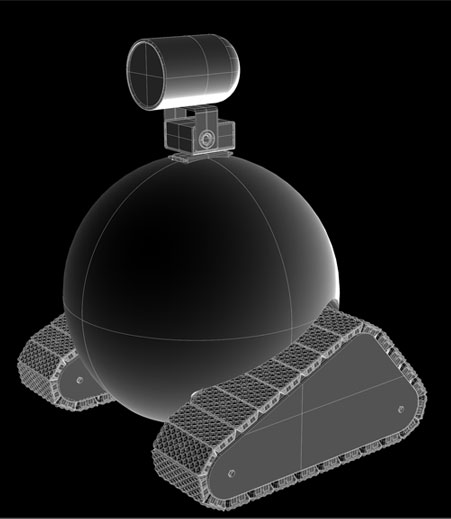
La instalación esta formada por un conjunto de robots que disponen de cámaras de vigilancia. El movimiento y la dirección son ejecutados por una electrónica de control basada en arduino, con varios sensores, drivers de motores, servomotores y sistemas de navegación.
Los robots están equipados con sistemas de posicionamiento espaciales basados en detección de posición por un software de visión artificial y sensores de orientación magnética. Todo el sistema es controlado por un ordenador de manera remota, que monotoriza la zona de la instalación y envía mensajes a los robos para que interactúen de manera conjunta y perfectamente sincronizada con los visitantes.
Los robots envían en tiempo real las señales de vídeo por radio para visualizar in situ y por internet las imágenes que captan cámaras.

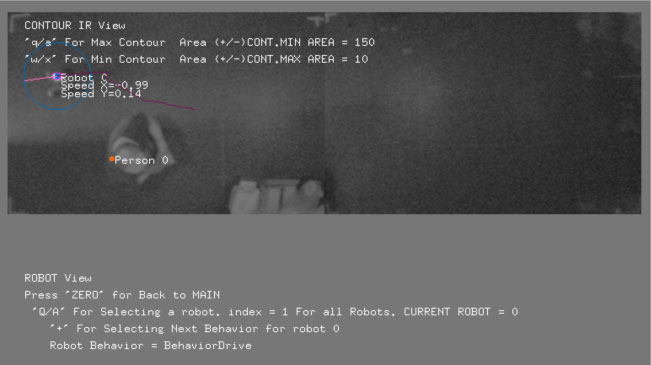
El software que controla toda la instalación está desarrollado utilizando librerías de código abierto bajo C++ usando el toolkit OpenFrameWorks. El software está conectado a los robots a través de sistema de comunicación inalámbrica basados en redes Zigbee. En función de la posición de los visitantes y de los robots captadas por las cámaras de vigilancia, la IA del software elige diferentes comportamientos de los robots a los cuales se les envían comandos en tiempo real.
Por otra parte el software recibe por telemetría todos los valores de los sensores del robot que le permiten también tomar decisiones, como cambios de ángulos de giro, personas u objetos detectados, etc... El software también controla los sistemas de iluminación infrarroja del espacio facilitando una correcta distinción entre robots y personas.
Mostramos una serie de imágenes de la evolución del proyecto:








Vïdeos de la instalación
Desde aquí puedes acceder a ver la instalación EN DIRECTO!!!
Concepto y desarrollo:
Ricardo Iglesias
Producción:
- Hangar.org. Centro de investigación y producción de artes visuales. Barcelona.
Álex Posada, Carme Romero, Miguel Ángel de Heras, Bartosz Zygmunt (M.I.D.), Julio Lucio, Lluis Gomez
Entidades colaboradoras
- Ayudas a la Creación Contemporánea. Matadero. Madrid, 2008.
- Becas KREA Expresión Contemporánea. Caja Vital Kutxa. Vitoria-Gasteiz, 2009.
- FONS09. Consell Nacional de la Cultura i les Arts. Barcelona, 2009.
- Escuela Universitaria de Ingeniería Técnica Industrial de Barcelona.